Linux Kernel Physical Memory Management*
Understanding the Linux Virtual Memory Manager - Describing Physical Memory
Tldr
内核如何管理物理内存,struct Page 结构体,自底向上:从 e820 到 memblock 再到伙伴系统、slub。
Get memory layout from e820 hardware*
x86 平台上,由 e820 硬件侦测物理内存分布,软件通过 0x15 中断与其通信。从软件角度看,e820 保存了一张内存布局表,内容如下。
BIOS-e820: [mem 0x0000000000000000-0x000000000009fbff] usable
BIOS-e820: [mem 0x000000000009fc00-0x000000000009ffff] reserved
BIOS-e820: [mem 0x00000000000f0000-0x00000000000fffff] reserved
BIOS-e820: [mem 0x0000000000100000-0x000000007ffdefff] usable
BIOS-e820: [mem 0x000000007ffdf000-0x000000007fffffff] reserved
BIOS-e820: [mem 0x00000000b0000000-0x00000000bfffffff] reserved
BIOS-e820: [mem 0x00000000fed1c000-0x00000000fed1ffff] reserved
BIOS-e820: [mem 0x00000000feffc000-0x00000000feffffff] reserved
BIOS-e820: [mem 0x00000000fffc0000-0x00000000ffffffff] reserved
BIOS-e820: [mem 0x0000000100000000-0x000000027fffffff] usable
每条 e820 表项包含起始地址,内存大小和内存类型。
arch/x86/boot/main.c 中的 main 负责在实模式进行一系列初始化,为进入保护模式做准备。调用 detect_memory 探测物理内存布局,其中就调用了 detect_memory_e820 从 e820 硬件获取内存信息,通过 0x15 中断遍历整个表,将其保存在 boot_params.e820_map。
在后续 arch/x86/kernel/x86.c 中的 setup_arch 中,调用 e820__memory_setup 将获取的内容拷贝到内核中的结构 e820_table,并进行排序。
相关的函数调用如下。
// arch/x86/boot/main.c
main ->
// arch/x86/boot/memory.c
detect_memory ->
detect_memory_e820
// init/main.c
start_kernel ->
// arch/x86/kernel/setup.c
setup_arch ->
// arch/x86/kernel/e820.c
e820__memory_setup ->
x86_init.resources.memory_setup() -> e820__memory_setup_default
e820__print_table
e820__reserve_setup_data
e820__finish_early_params
e820_add_kernel_range
Memblock*
Memblock 是内核启动时用的内存分配器,在伙伴系统准备好之前,都是使用它分配物理内存。
Memblock 管理了两端内存区:memblock.memory 和 memblock.reserved。所有物理上可用的内存区域都会被添加到 memblock.memory,而被分配或被系统占用的区域则会添加到 memblock.reserved,而被分配的内存空间并不会从 memblock.memory 区域移除。
如下图,系统中由三段可用的内存空间,而其中两个已被分配。如果想要释放已分配的内存,memblock.memory 不会有变化,只要从 memblock.reserved 中移除即可。
+---------------------------+ +---------------------------+
| memblock | | Array of the |
| _______________________ | | memblock_region |
| | memory | | | |
| | memblock_type |-|-->| [start1, end1) |
| |_______________________| | | |
| | | [start2, end2) |
| | | |
| | | [start3, end3) |
| | | |
| | +---------------------------+
| |
| _______________________ | +---------------------------+
| | reserved | | | Array of the |
| | memblock_type |-|-->| memblock_region |
| |_______________________| | | |
| | | [start1, end1) |
| | | |
| | | [start2, end2) |
| | | |
+---------------------------+ +---------------------------+
几个重要的 API:
memblock_add和memblock_remove从下层获取可用的内存区域加入到memblock.memory;memblock_alloc_*,分配内存,其中调用memblock_find_in_range和memblock_reserve,找到空闲内存区域,将其加入memblock.reserved);memblock_free释放内存。- 将内存区域加入或移除
memblock.memory或memblock.reserved都是调用memblock_add_range实现。
从 e820 到 memblock 的函数调用如下。
// init/main.c
start_kernel ->
// arch/x86/kernel/setup.c
setup_arch ->
// arch/x86/kernel/e820.c
e820__memory_setup
memblock_set_current_limit
e820__memblock_setup
在 e820__memblock_setup 中,遍历 e820_table,将内存信息添加到 memblock 中。
NUMA node info*
NUMA, Non-Uniform Memory Access(非均匀内存访问),在处理器计算机上,内存访问时间取决于内存相对于处理器的位置。而在 NUMA 架构下,处理器访问其自身的本地内存比非本地内存(属于其他处理器或共享内存)更快。总的来说,NUMA 架构下分配物理内存需要区别对待,不同区域的内存称为不同的节点,节点之间定义距离的概念衡量内存访问时间的差异。
内核需要获取物理内存的 NUMA 信息,即某块内存对应哪个 NUMA 节点。x86 平台下,相关的函数调用如下。
// arch/x86/kernel/setup.c
setup_arch ->
// arch/x86/mm/numa_64.c
initmem_init ->
// arch/x86/mm/numa.c
x86_numa_init ->
numa_int ->
x86_acpi_numa_init/amd_numa_init
numa_cleanup_meminfo
numa_register_memblk
内核获取的 NUMA 相关信息保存在 numa_meminfo 结构中,通过 numa_register_memblk 将信息映射到 memblock 中。
QEMU 开启 NUMA 模拟的配置如下,使用 memdev 将指定内存区域分配给 NUMA 节点。(这里设置成 3 和 5 是为了看 ZONE_DMA32 在两个 NUMA 中的构成,见下节)。
/usr/local/bin/qemu-system-x86_64 \
-m 8G \
-smp 2 \
-object memory-backend-ram,id=mem0,size=3G \
-object memory-backend-ram,id=mem1,size=5G \
-numa node,nodeid=0,cpus=0,memdev=mem0 \
-numa node,nodeid=1,cpus=1,memdev=mem1 \
-cpu host \
-enable-kvm \
--machine q35 \
-kernel ../arch/x86/boot/bzImage \
-append "earlyprintk=ttyS0 debug console=ttyS0 pti=on nokaslr memblock=debug" \
-initrd initramfs.cpio\
-fsdev local,security_model=passthrough,id=fsdev-fs0,path=./shared \
-device virtio-9p-pci,id=fs0,fsdev=fsdev-fs0,mount_tag=test_mount \
-monitor unix:hmp-monitor,server,nowait \
-nographic \
内核启动参数中添加 memblock=debug,就可以在 dmesg 中查看相关信息:
// 从 e820_table 获取信息之后,没有 NUMA 节点信息(初始化 memblock 时将 numa_id 设置为了 MAX_NUMNODES,因此不会输出)。
MEMBLOCK configuration:
memory size = 0x00000001fff7dc00 reserved size = 0x00000000026b30fc
memory.cnt = 0x3
memory[0x0] [0x0000000000001000-0x000000000009efff], 0x000000000009e000 bytes flags: 0x0
memory[0x1] [0x0000000000100000-0x000000007ffdefff], 0x000000007fedf000 bytes flags: 0x0
memory[0x2] [0x0000000100000000-0x000000027fffffff], 0x0000000180000000 bytes flags: 0x0
...
// 从 numa_meminfo 获取 NUMA 信息之后,见上节的配置,因为将内存从 3G 处划分,所以这里的最后一块又被分开。
// 不过是在 5G 处分开的,因为从 e820 获取的内存信息已经是错开 2G 的。
MEMBLOCK configuration:
memory size = 0x00000001fff7dc00 reserved size = 0x000000000277f000
memory.cnt = 0x4
memory[0x0] [0x0000000000001000-0x000000000009efff], 0x000000000009e000 bytes on node 0 flags: 0x0
memory[0x1] [0x0000000000100000-0x000000007ffdefff], 0x000000007fedf000 bytes on node 0 flags: 0x0
memory[0x2] [0x0000000100000000-0x000000013fffffff], 0x0000000040000000 bytes on node 0 flags: 0x0
memory[0x3] [0x0000000140000000-0x000000027fffffff], 0x0000000140000000 bytes on node 1 flags: 0x0
Node-Zone-Page*
Node, Zone, Page 是内核中内存管理模块的常见概念,下图展示了它们之间的关系。
下图展示了Node 和 Zone 的关系。
Memory
16M 4G 6G
[ ZONE_DMA | ZONE_DMA32 | ZONE_NORMAL ]
3G
^ ^ ^
|<--- Node0 --->|<--- Node1 --->|
Node 是从内存亲和性(处理器访问内存的时间不同)出发的定义,表现为地址上的分布,但实际上不是从地址出发的定义。
而 Zone 是从地址大小出发的定义,不论系统上的内存多大,每个 zone 的空间是一定的,比如 ZONE_DMA 一定是 16M 以下的空间。
所以在某些 node 上的 zone 是空的,比如 Node1 就没有 ZONE_DMA。
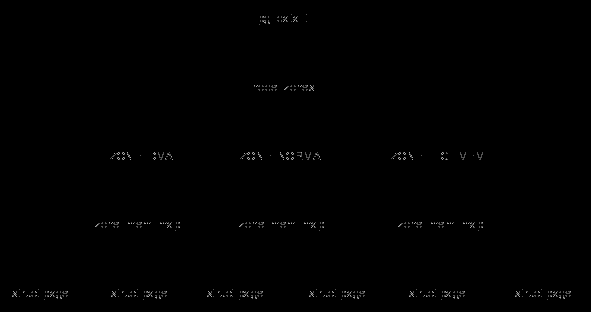
对应上图,内核初始化完成后的 Node-Zone 相关结构如下,其中的 node_data 就是 pg_data_t。
node_data[0] node_data[1]
(typedef struct pglist_data {} pg_data_t) (typedef struct pglist_data {} pg_data_t)
+-----------------------------+ +-----------------------------+
|node_id <---+ | |node_id <---+ |
| (int) | | | (int) | |
+-----------------------------+ +-----------------------------+
|node_zones[MAX_NR_ZONES] | | [ZONE_DMA] |node_zones[MAX_NR_ZONES] | | [ZONE_DMA]
| (struct zone) | | +---------------+ | (struct zone) | | +---------------+
| +-------------------------+ |0 | | +-------------------------+ |empty |
| | | | |16M | | | | | | |
| |zone_pgdat ----+ | +---------------+ | |zone_pgdat ----+ | +---------------+
| | | | | |
| | | [ZONE_DMA32] | | | [ZONE_DMA32]
| | | +---------------+ | | | +---------------+
| | | |16M | | | | |3G |
| | | |3G | | | | |4G |
| | | +---------------+ | | | +---------------+
| | | | | |
| | | [ZONE_NORMAL] | | | [ZONE_NORMAL]
| | | +---------------+ | | | +---------------+
| | | |empty | | | | |4G |
| | | | | | | | |6G |
+---+-------------------------+ +---------------+ +---+-------------------------+ +---------------+
ZONE_DMA和ZONE_DMA32的大小是固定的;- Node0 上的
ZONE_NORMAL为空; - Node1 上的
ZONE_DMA为空。
在 mm/page_alloc.c 中的 calculate_node_totalpages 中加入输出 zone 信息的代码,在 dmesg 中可以看到:
Node[0] Zone info:
ZONE_DMA -> [0x00001000 -- 0x01000000] // [4K, 16M)
ZONE_DMA32 -> [0x01000000 -- 0x100000000] // [16M, 4G)
ZONE_Normal -> [0x100000000 -- 0x140000000] // [4G, 5G)
ZONE_Movable -> [0x00000000 -- 0x00000000] // [0, 0) NULL
ZONE_Device -> [0x280000000 -- 0x280000000] // [10G, 10G) NULL
Node[1] Zone info:
ZONE_DMA -> [0x01000000 -- 0x01000000] // [16M, 16M) NULL
ZONE_DMA32 -> [0x100000000 -- 0x100000000] // [4G, 4G) NULL
ZONE_Normal -> [0x140000000 -- 0x280000000] // [5G, 10G)
ZONE_Movable -> [0x00000000 -- 0x00000000] // [0, 0) NULL
ZONE_Device -> [0x280000000 -- 0x280000000] // [10G, 10G) NULL
可以看到,内存被划分为 node,每个 node 又被划分为 zone,虽然不是每个 zone 都有内存,但内核还是把 page 相关的信息保存在 zone 中。
内存分配时,先决定从哪个 node 上分配,找到适合本地执行的内存,然后再决定去哪个 zone 上分配。或者也可以按照 zone 分配,如某些设备只能使用 ZONE_DMA 的内存,那么按照 zone 分配更快。下面先看看 zone 和 page 时怎么联系的,如下图。
struct zone
+------------------------------+ The buddy system
|free_area[MAX_ORDER] 0...10 |
| (struct free_area) |
| +--------------------------+
| |nr_free | number of available pages
| |(unsigned long) | in this zone
| | |
| +--------------------------+
| | | free_area[0]
| |free_list[MIGRATE_TYPES] | Order0 +-----------------------+
| |(struct list_head) | Pages |free_list |
| | | | (struct list_head) |
| | | +-----------------------+
| | |
| | | free_area[1]
| | | Order1 +-----------------------+
| | | Pages |free_list |
| | | | (struct list_head) |
| | | +-----------------------+
| | |
| | | .
| | | .
| | | .
| | |
| | |
| | | free_area[10]
| | | Order10 +-----------------------+
| | | Pages |free_list |
| | | | (struct list_head) |
| | | +-----------------------+
| | |
+---+--------------------------+
- 每个 zone 上有一个
free_area数组; - 每个数组元素中包含一个链表;
- 每个链表元素指向一个表达 2^N 大小内存的页。(但是似乎没看到要怎么找对应的 page 结构体)
怎么感觉就是伙伴系统,分配的时候找对应的 zone,查看是否有可以使用的页,如果没有指定大小的页,就去更高阶的链表上找。(后面会有伙伴系统)
内存按照 node 和 zone 划分的目的还是为了分配和回收内存。而分配的顺序时按照 pg_data_t 中的按照 zone 顺序排好的链表 node_zontlists,如下图。
node_data[]
+-----------------------------+
|node_zonelists[MAX_ZONELISTS]|
| (struct zonelist) |
| +-------------------------+
| |_zonerefs[] | = MAX_NUMNODES * MAX_NR_ZONES + 1
| | (struct zoneref) | Node 0:
| | +----------------------+ [ZONE_NORMAL] [ZONE_DMA32] [ZONE_DMA]
| | |zone | +---------------+ +---------------+ +---------------+
| | | (struct zone*) | | | | | | |
| | |zone_idx | | | | | | |
| | | (int) | +---------------+ +---------------+ +---------------+
+---+--+----------------------+
Node 1:
[ZONE_NORMAL] [ZONE_DMA32] [ZONE_DMA]
+---------------+ +---------------+ +---------------+
| | | | | |
| | | | | |
+---------------+ +---------------+ +---------------+
每个 node_data 都有自己的 node_zonelists,用于表示该 NUMA 节点上分配内存时如何按照 zone 找到空闲内存的顺序。
Sparsemem*
每个物理内存页都对应一个 struct page 结构体,那么给定物理地址,如何找到对应的结构体。
原始的解决方案,系统中的 struct page 都存在一个超大的静态数组中,每个物理页帧都有对应的 page 结构体。这带来一些问题,比如内存当中有空洞,即某些物理地址并不在内存上存在,也就不需要有对应的结构体。为此,内核引入了 sparsemem 稀疏内存,只有有效的物理内存页才会有对应的 struct page 存在。
Sparsemem 方案减少了内存占用,同时也带来一个问题,通过物理页帧获取对应的结构体 pfn_to_page 会比原来慢,原来的静态数组,就是直接基址加上偏移(页帧号× struct page 大小)就得到结构体。
Sparsemem 引入了 section 的概念,所谓 section 就是比 page 更大的内存区域,但又比 node 的范围小,x86_64 上 section 大小为 128M。
那么整个系统的物理内存就被分成一个个 section,由 struct mem_section 结构体表示,结构体中保存了该 section 范围内 struct page 结构体的地址。使用 sparsemem 之后,如果某个 section 为空(内存空洞),那么就不会分配这个 section 中的 page 结构体。
内核使用全局的 mem_section 数组管理系统内存,每个元素管理 128M 的内存。
mem_section[NR_SECTION_ROOTS][SECTIONS_PER_ROOT]
= [DIV_ROUND_UP(NR_MEM_SECTIONS, SECTIONS_PER_ROOT)] [SECTIONS_PER_ROOT]
[0] [1] [SECTIONS_PER_ROOT - 1]
+------------+------------+ +------------+------------+
[0] | | | ... | | |
+------------+------------+ +------------+------------+
+------------+------------+ +------------+------------+
[1] | | | ... | | |
+------------+------------+ +------------+------------+
+------------+------------+ +------------+------------+
[2] | | | ... | | |
+------------+------------+ +------------+------------+
struct mem_section 结构体中的 section_mem_map 指向 page 结构体数组。
mem_section
+-----------------------------+
|pageblock_flags |
| (unsigned long *) |
| |
| |
+-----------------------------+ mem_map[PAGES_PER_SECTION]
|section_mem_map | ----> +------------------------+
| (unsigned long) | [0] |struct page |
| | | |
| | +------------------------+
+-----------------------------+ [1] |struct page |
| |
+------------------------+
[2] |struct page |
| |
+------------------------+
| |
. .
. .
. .
| |
+------------------------+
|struct page |
| |
+------------------------+
[PAGES_PER_SECTION - 1] |struct page |
| |
+------------------------+
内核 sparsemem 相关初始化的函数调用如下,主要做的工作就是判断 section 是否存在,以及为存在的 section 分配 memmap 。
// arch/x86/kernel/setup.c
setup_arch ->
e820__memblock_setup()
init_mem_mapping()
initmem_init()
// arch/x86/mm/init_64.c
x86_init.paging.pagetable_init() -> paging_init() ->
// mm/page_alloc.c
sparse_memory_present_with_active_regions(MAX_NUMNODES) ->
memory_present
// mm/sprase.c
sparse_init ->
sparse_init_nid
// arch/x86/mm/init.c
zone_sizes_init
前面提到 sparsemem 会使 pfn_to_page 变慢,相关的定义如下。更改后,先要找到 section,然后再计算 page 结构体的地址,比原来多了一步。其实从这里就能看出 sparsemem 的本质,section 结构体仍然是连续的,但是把 page 结构体改为动态分配,对于永远不会用到 pfn_to_page 的地址(内存空洞),就不再分配 page。另外,最后的计算是 section_mem_map + pfn,看起来似乎应该是 section_mem_map + pfn - section_start_pfn。而在这段定义上面的注释也说明了这个问题。
// include/asm-generic/memory_model.h
// 没有 sparsemem
#define __pfn_to_page(pfn) (mem_map + ((pfn) - ARCH_PFN_OFFSET))
// CONFIG_SPARSEMEM
/*
* Note: section's mem_map is encoded to reflect its start_pfn.
* section[i].section_mem_map == mem_map's address - start_pfn;
*/
#define __pfn_to_page(pfn) \
({ unsigned long __pfn = (pfn); \
struct mem_section *__sec = __pfn_to_section(__pfn); \
__section_mem_map_addr(__sec) + __pfn; \
})
Page struct*
struct page 可以说是内核中最复杂的结构体定义了,因为每个物理页都对应一个 page 结构体,所以要极尽压缩空间,因此就诞生了一个 union 里定义了 7 个结构体的神奇操作。
Todo
union 中有一个结构体是与页表页相关,可能会用到。
其中 flags 字段标志了页的属性,在 include/linux/page-flags-layout.h 和 include/include/page-flags.h 中定义了一系列关于该字段的布局和宏定义。
对字段的操作主要有三类:
PageXXX():用于判断属性;SetPageXXX():用于设置页属性:ClearPageXXX():用于清楚页属性。
Buddy system*
系统启动初期使用 memblock 管理内存,而在启动之后 memblock 无法满足需求,就需要新的页分配器。内核进行 Node-Zone-Page 一系列设置就是为页分配器做准备。
内核从 e820 获取物理内存布局,建立 memblock。同时在 sparsemem 初始化过程中动态分配了 page 结构体。而内核是如何将物理内存页与 page 结构体相对应,并将 page 结构体加入到对应的 zone 中呢?
相关的函数调用如下。整个流程就是遍历 memblock 的内存信息,填充 page 结构体的过程。
// init/main.c
start_kernel ->
mm_init ->
// arch/x86/mm/init_64.c
mem_init ->
memblock_free_all ->
// mm/memblock.c
free_low_memory_core_early ->
for_each_free_mem_range
__free_memory_core ->
...
__free_pages_core ->
set_page_refcounted
__free_pages ->
__free_one_page
同时可以看到,初始化 page 其实是调用内存释放的方法。内存释放通常使用 mm/page_alloc.c 中的 free_pages,最终调用 __free_one_page。伙伴系统分配器,释放时会判断相邻的页是否空闲,如果是则合并,然后继续判断。最终,释放的页都添加到 zone->free_area[order].free_list 上。
页分配的核心函数是 __alloc_pages_nodemask,分配的过程就是按照优先级搜索 node 和 zone,找到匹配的 zone 则在其 free_area 链表取下一个。如果分配到高阶的 page,就将高阶部分放回对应的 frea_area 中。
下面探究伙伴系统中的具体算法,即如何实现分配 1 - 2^{10} 的空闲页。释放时合并页的相关代码如下。
// mm/page_alloc.c
__free_one_page()
while (order < max_order - 1) {
...
buddy_pfn = __find_buddy_pfn(pfn, order);
buddy = page + (buddy_pfn - pfn);
if (!pfn_valid_within(buddy_pfn))
goto done_merging;
if (!page_is_buddy(page, buddy, order))
goto done_merging;
/*
* Our buddy is free or it is CONFIG_DEBUG_PAGEALLOC guard page,
* merge with it and move up one order.
*/
if (page_is_guard(buddy))
clear_page_guard(zone, buddy, order, migratetype);
else
del_page_from_free_area(buddy, &zone->free_area[order]);
combined_pfn = buddy_pfn & pfn;
page = page + (combined_pfn - pfn);
pfn = combined_pfn;
order++;
}
其中最重要的是 __find_buddy_pfn,即找到当前 page 结构体的伙伴,代码如下。
/*
* Locate the struct page for both the matching buddy in our
* pair (buddy1) and the combined O(n+1) page they form (page).
*
* 1) Any buddy B1 will have an order O twin B2 which satisfies
* the following equation:
* B2 = B1 ^ (1 << O)
* For example, if the starting buddy (buddy2) is #8 its order
* 1 buddy is #10:
* B2 = 8 ^ (1 << 1) = 8 ^ 2 = 10
*
* 2) Any buddy B will have an order O+1 parent P which
* satisfies the following equation:
* P = B & ~(1 << O)
*
* Assumption: *_mem_map is contiguous at least up to MAX_ORDER
*/
static inline unsigned long
__find_buddy_pfn(unsigned long page_pfn, unsigned int order)
{
return page_pfn ^ (1 << order);
}
找当前 pfn 的伙伴的方法其实就是将 pfn 中第 order 位取反,而想找当前的 pfn 在第 order+1 的父节点(即这段 2^{order+1} 个页的起始),就将 order 位清零。在上面 __free_one_page 的代码中,combined_pfn = buddy_pfn & pfn 其实就是将 order 位清零(因为 pfn 和 buddy_pfn 只有第 order 位不同),得到合并后的 combined_pfn。
Page 结构体中有两个重要的引用计数,帮助伙伴系统管理。
_refcount:即引用计数,记录当前页的使用者个数;_mapcount:记录当前页映射到到页表的次数,初始为 -1。
在内核中如果后者大于前者,则称此页被 pin 住。页在伙伴系统中时引用计数为 0,有新的使用者,使用 get_page 增加计数,在 put_page 中,会检查引用计数是否为零,减到零则释放给伙伴系统。
per_cpu_pageset*
伙伴系统和 zone 的信息时对等的,如果每次都要从伙伴系统获取页,随着 CPU 个数的增加,对伙伴系统的竞争越来越大。为此,内核引入 per_cpu_pageset(pcp),先从 zone 这个大仓库中拿出一些页,放入每个 cpu 的小仓库,释放时也是先放回 pcp,满了之后再还给 zone。zone 结构体中的 pcp 结构如下。
struct zone
+------------------------------------------------------------------------------------------------+
|pageset |
| (struct per_cpu_pageset *) |
| cpu0 cpu1 cpuN |
| +--------------------------+ +--------------------------+ ... +--------------------------+
| |pcp | |pcp | |pcp |
| | (struct per_cpu_pages) | | (struct per_cpu_pages) | | (struct per_cpu_pages) |
| | +-----------------------+ | +-----------------------+ | +-----------------------+
| | |count | | |count | | |count |
| | |high | | |high | | |high |
| | |batch | | |batch | | |batch |
| | | | | | | | | |
| | |lists[MIGRATE_PCPTYPES]| | |lists[MIGRATE_PCPTYPES]| | |lists[MIGRATE_PCPTYPES]|
+---+--+-----------------------+--+--+-----------------------+--------+--+-----------------------+
zone 上记录了每个 cpu 上小仓库的信息:
count:有多少页;high:如果页数量超过 high,则还给 zone;batch:pcp 没有页,则从 zone 中分配 batch 个页。
slub*
Todo
有时间看一下 slub 分配器的相关内容。以前看 KVM 的代码中用到 kmem_cache,应该就是 slub 的接口。